I am a PhD candidate at the University of Twente working on real time spatial perception and autonomous UAV mapping. My research combines SLAM, visual inertial odometry, 3D scene graph construction, monocular depth estimation, semantic segmentation, and learning based control.
My main focus is developing deployable robotic systems that allow UAVs to understand, map, and navigate unknown indoor environments using lightweight sensors. I developed Mono Hydra++, which builds semantically rich 3D representations from monocular camera and IMU input, and use these representations for autonomous UAV behaviour trained through reinforcement learning and imitation learning.
My broader goal is to connect deep visual perception, geometric mapping, and robot decision making into real time systems that can run on edge platforms and operate reliably in complex environments.
Expertise
Computer Science
- Graph Construction
- 3d Scenes
- Robotics
- Robot
- Multitask Learning
- Range Finder
- Mobile Platform
Engineering
- Ultrasonic Sensor
Organisations
My research focuses on real time spatial perception and autonomous UAV mapping in complex indoor environments. I work on systems that combine photogrammetric computer vision, visual inertial odometry, SLAM, deep learning, reinforcement learning, imitation learning, and edge robotics.
A central part of my work is developing monocular mapping systems that use camera and IMU input to build metric and semantic 3D representations of the environment. This includes 3D scene graph construction, dense depth estimation, semantic segmentation, and sensor fusion for UAV based scene understanding.
I am particularly interested in connecting learned perception with geometric mapping and robot decision making. My goal is to develop autonomous drones that can understand their surroundings, build semantically rich maps, and use these representations for reliable navigation and task execution on edge platforms.
Publications
2026
2025
2023
Research profiles
PhD Candidate in Robotics and Computer Vision
University of Twente, The Netherlands
2022 to present
Research topic: Autonomous real time UAV mapping with spatial perception in indoor environments.
Master’s Degree in Robotics Engineering
Middlesex University Dubai, United Arab Emirates
2019 to 2021
Graduated with Distinction. Thesis on heterogeneous swarm robot systems with distributed edge processing for collective transportation.
Bachelor of Electrical and Electronics Engineering
University of Peradeniya, Sri Lanka
2014 to 2017
Second Class Upper Division, GPA 3.55 out of 4.00. Awarded Best Undergraduate Project by the Institution of Engineers Sri Lanka.
Affiliated study programs
Current projects
Finished projects
Mono-Hydra
MONO-HYDRA: REAL-TIME 3D SCENE GRAPH CONSTRUCTION FROM MONOCULAR CAMERA INPUT WITH IMU
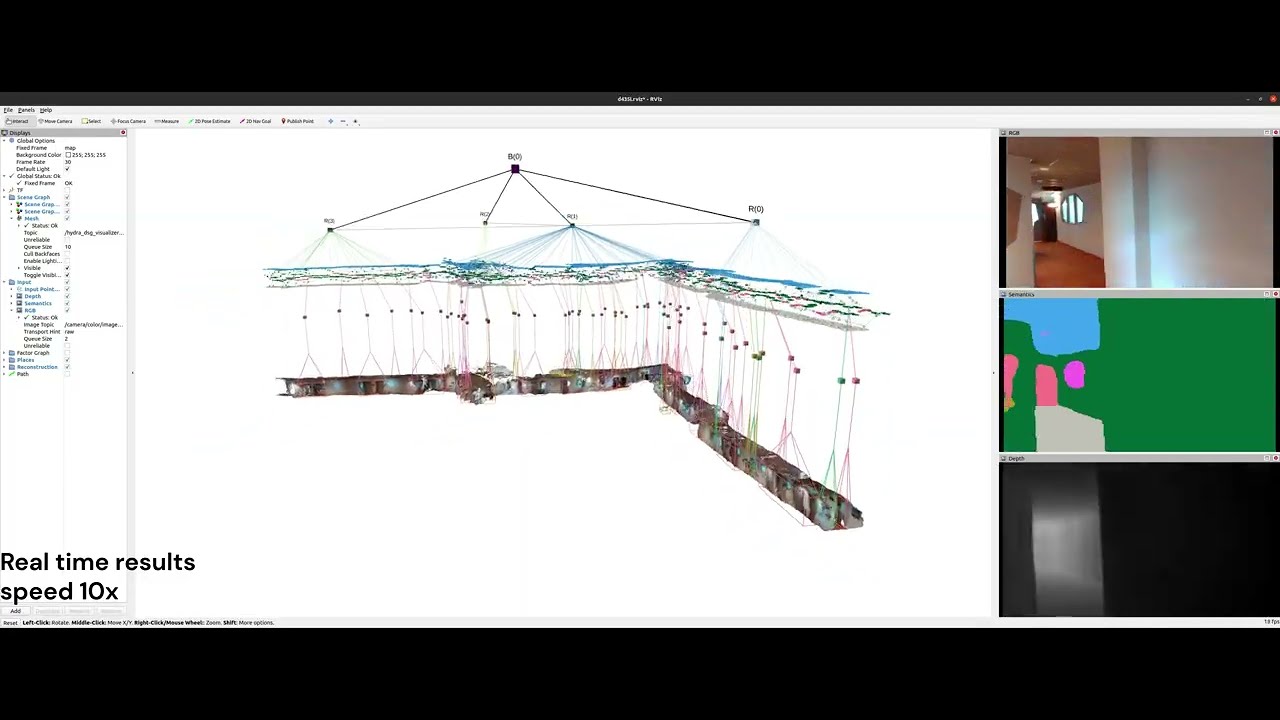
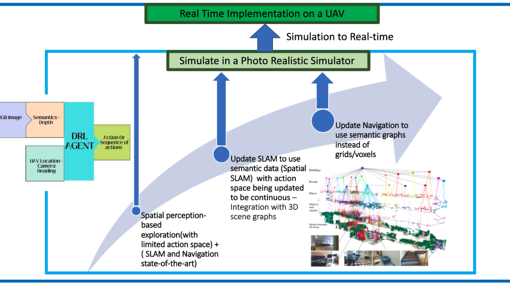
The ability of robots to autonomously navigate through 3D environments depends on their comprehension of spatial concepts, ranging from low-level geometry to high-level semantics, such as objects, places, and buildings. To enable such comprehension, 3D scene graphs have emerged as a robust tool for representing the environment as a layered graph of concepts and their relationships. However, building these representations using monocular vision systems in real-time remains a difficult task that has not been explored in depth. This paper puts forth a real-time spatial perception system Mono-Hydra, combining a monocular camera and an IMU sensor setup, focusing on indoor scenarios. However, the proposed approach is adaptable to outdoor applications, offering flexibility in its potential uses. The system employs a suite of deep learning algorithms to derive depth and semantics. It uses a robocentric visual-inertial odometry (VIO) algorithm based on square-root information, thereby ensuring consistent visual odometry with an IMU and a monocular camera. This system achieves sub-20 cm error in real-time processing at 15 fps, enabling real-time 3D scene graph construction using a laptop GPU (NVIDIA 3080). This enhances decision-making efficiency and effectiveness in simple camera setups, augmenting robotic system agility. We make Mono-Hydra publicly available at: https://github.com/UAV-Centre-ITC/Mono_Hydra.

Vision-based mobile robot for reconnaissance
The objective was to create a 3D map of an unknown environment. It was tackled in 3 main fronts as a 3D- Vision system, an intelligent navigation system (INS) and holonomic robot platform with the localization algorithm. The vision system was developed at the basic level through fashioning two web cameras as a stereo camera pair. Laser ranging was used as the sensing method and a 2D map of the environment was obtained through the efficient guidance of the intelligent navigation system. A particle filter-based SLAM algorithm was implemented for the task localization a Kinect sensor was interfaced with the system for the task of extending the map to 3D.
Address

University of Twente
Langezijds (building no. 19), room 2305
Hallenweg 8
7522 NH Enschede
Netherlands
University of Twente
Langezijds 2305
P.O. Box 217
7500 AE Enschede
Netherlands
 Scan the QR code or
Scan the QR code or